
Pebble Tangible Interaction Design
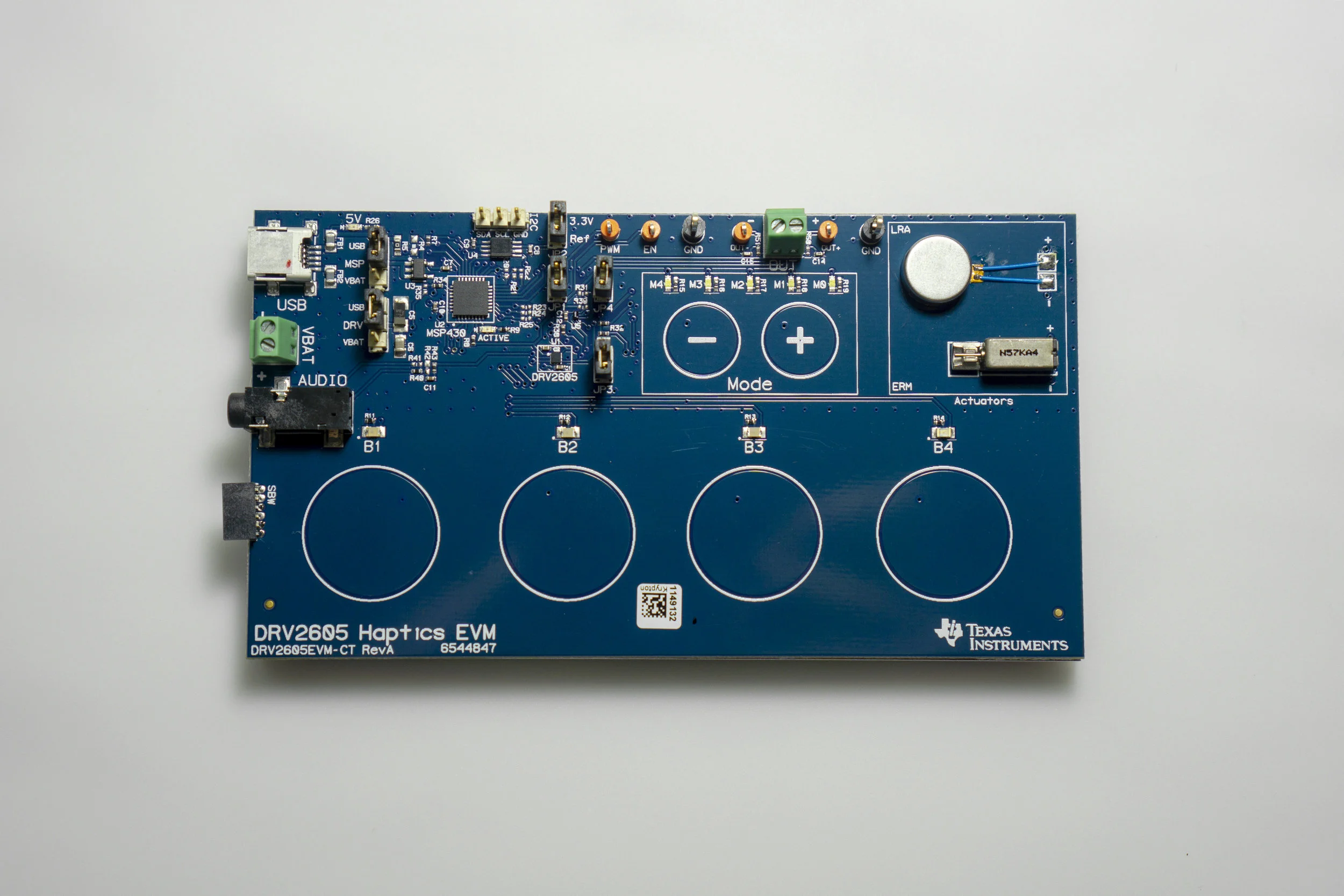
In between the the release of the first and second generation of Pebble Time devices, I worked on a team exploring advanced device interactions. This particular exploration was around nuanced haptics performance and interaction. I created testing rigs and interviewed users based on difference haptic systems and implementations in the context of our wearables. The results of both the hardware and software explorations were then implemented in the 2nd and 3rd generation devices.



